Project
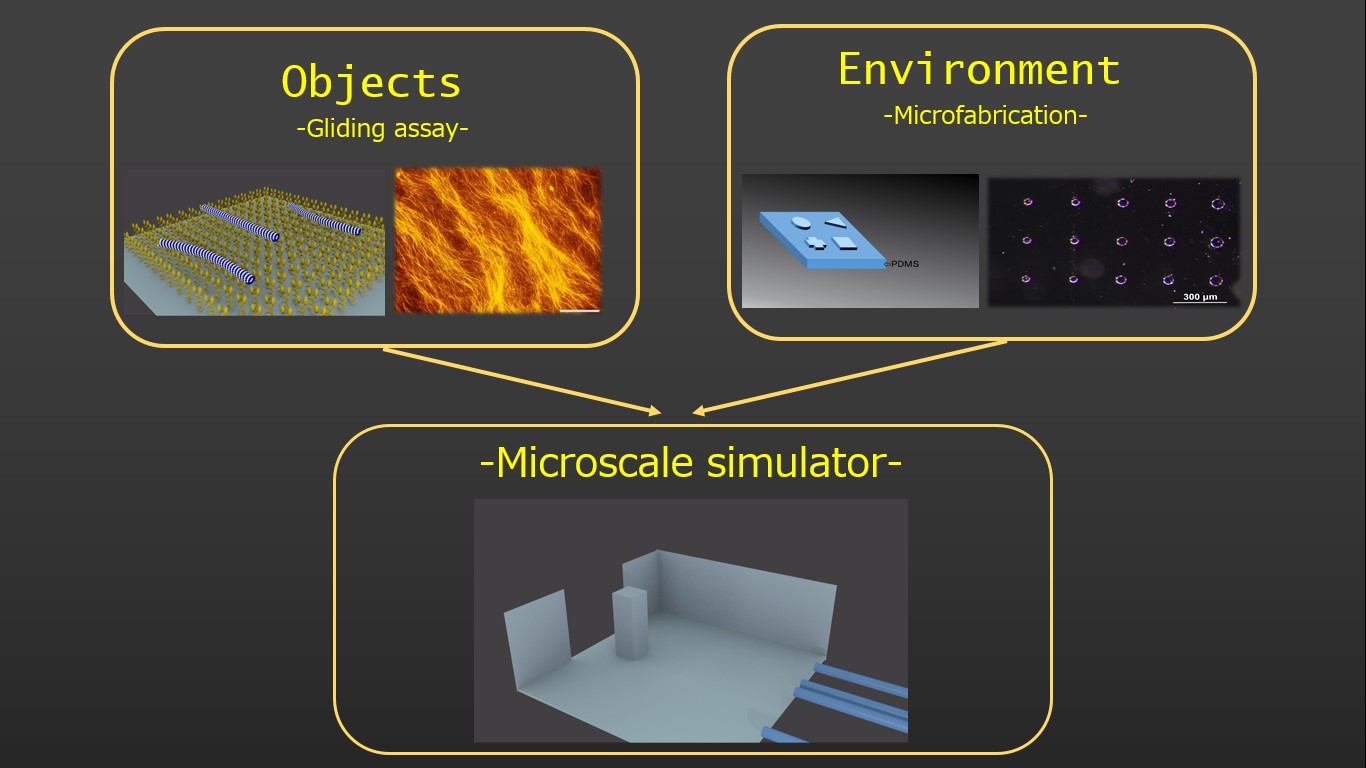
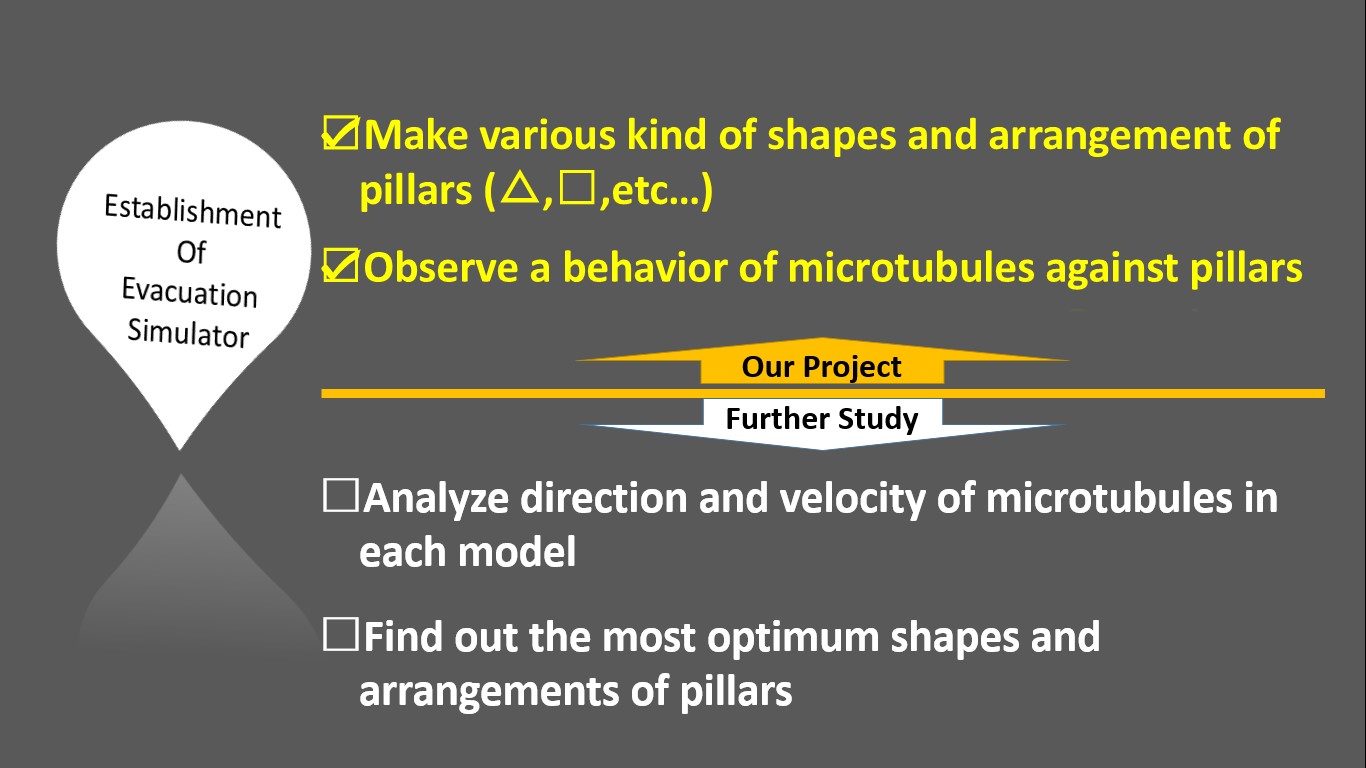
Our goal is to reproduce crowded motion of human in micro-scale and simulate how people behave when they are crowded. Eventually, we want to apply the result to solving the congestion in the real world. In order to achieve this goal, we need a practical and reasonable simulator such as micro-scale environment and objects which can compare to a building and human beings. The detailed steps are introduced as follows;
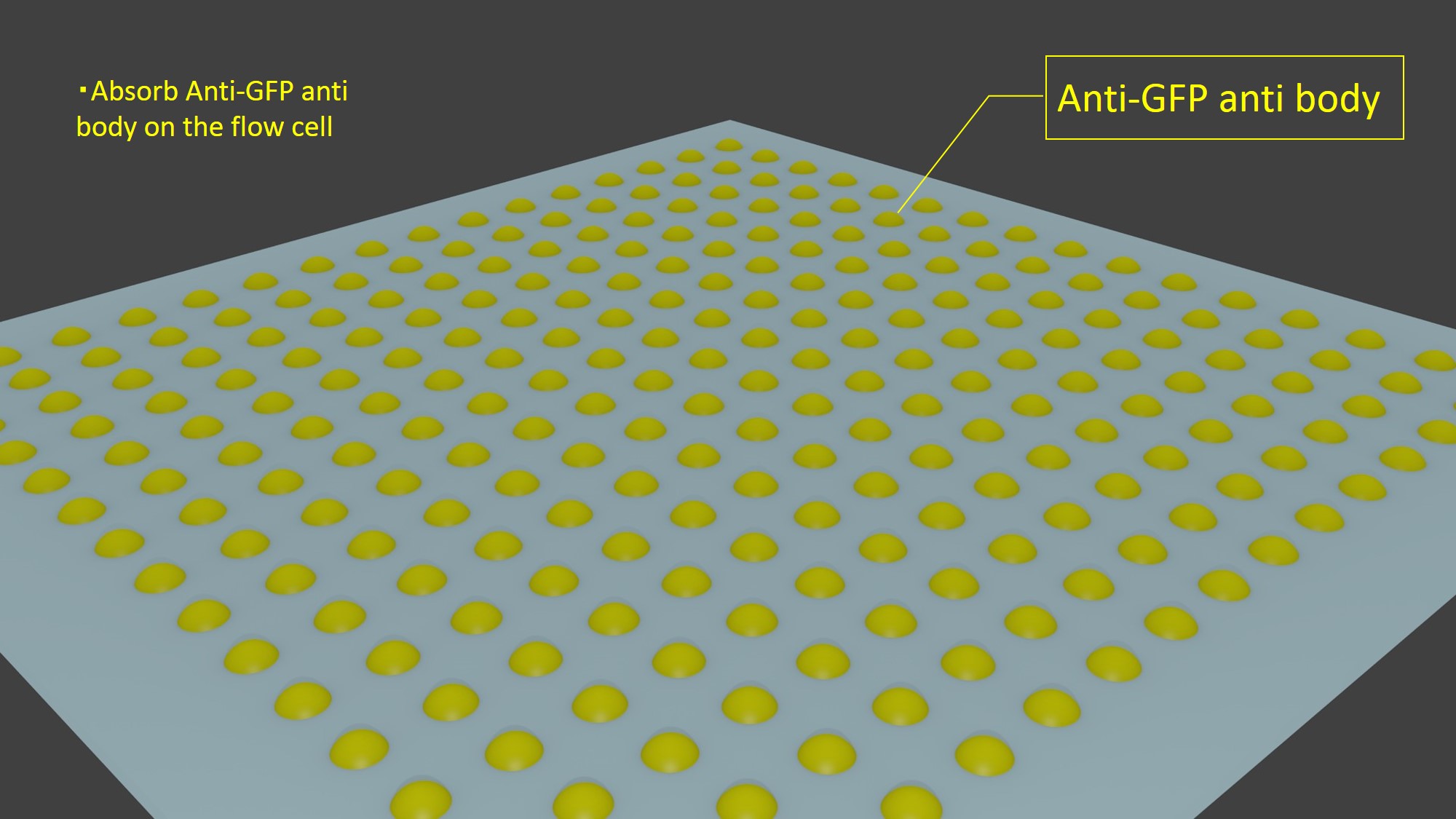
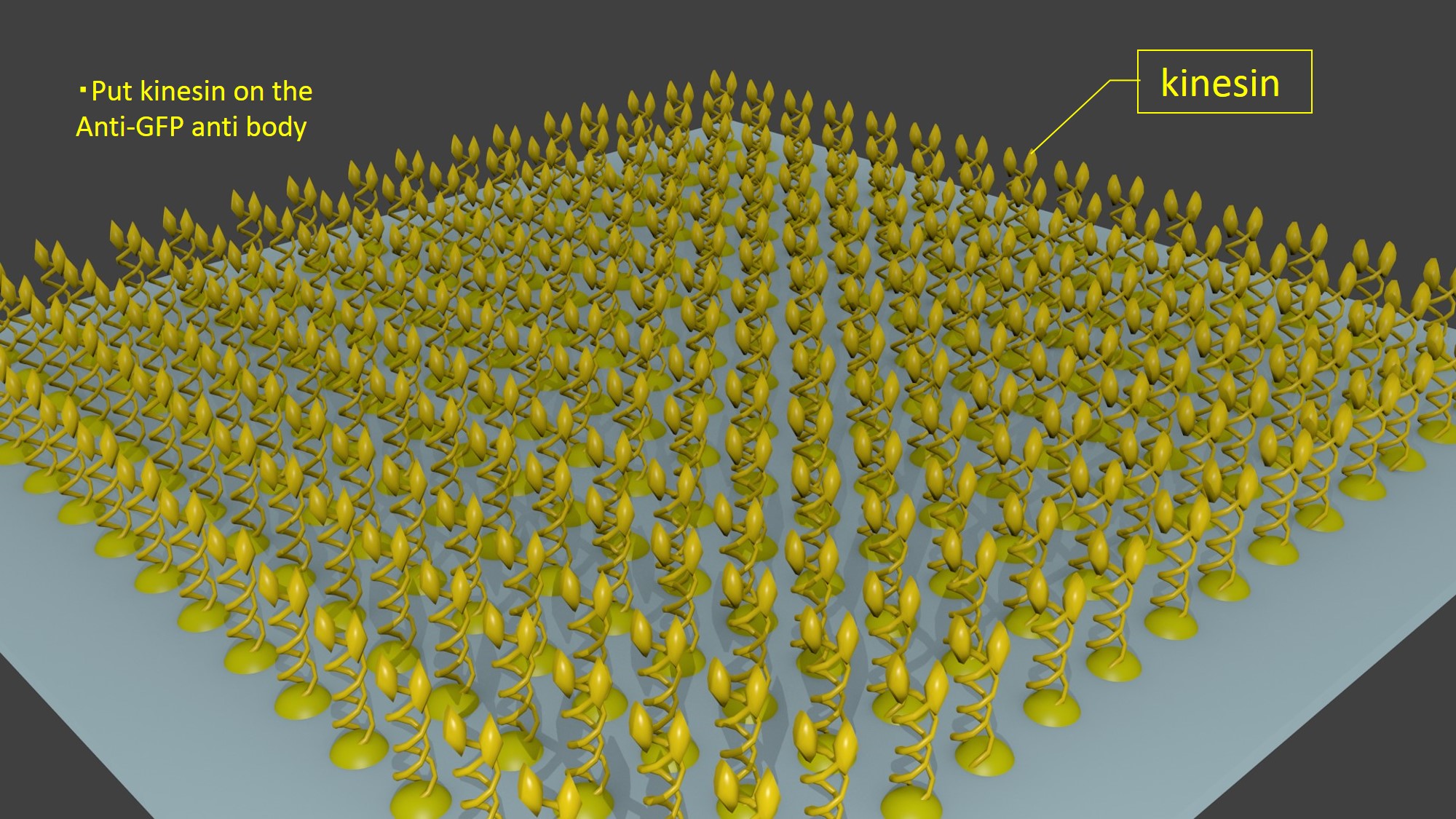
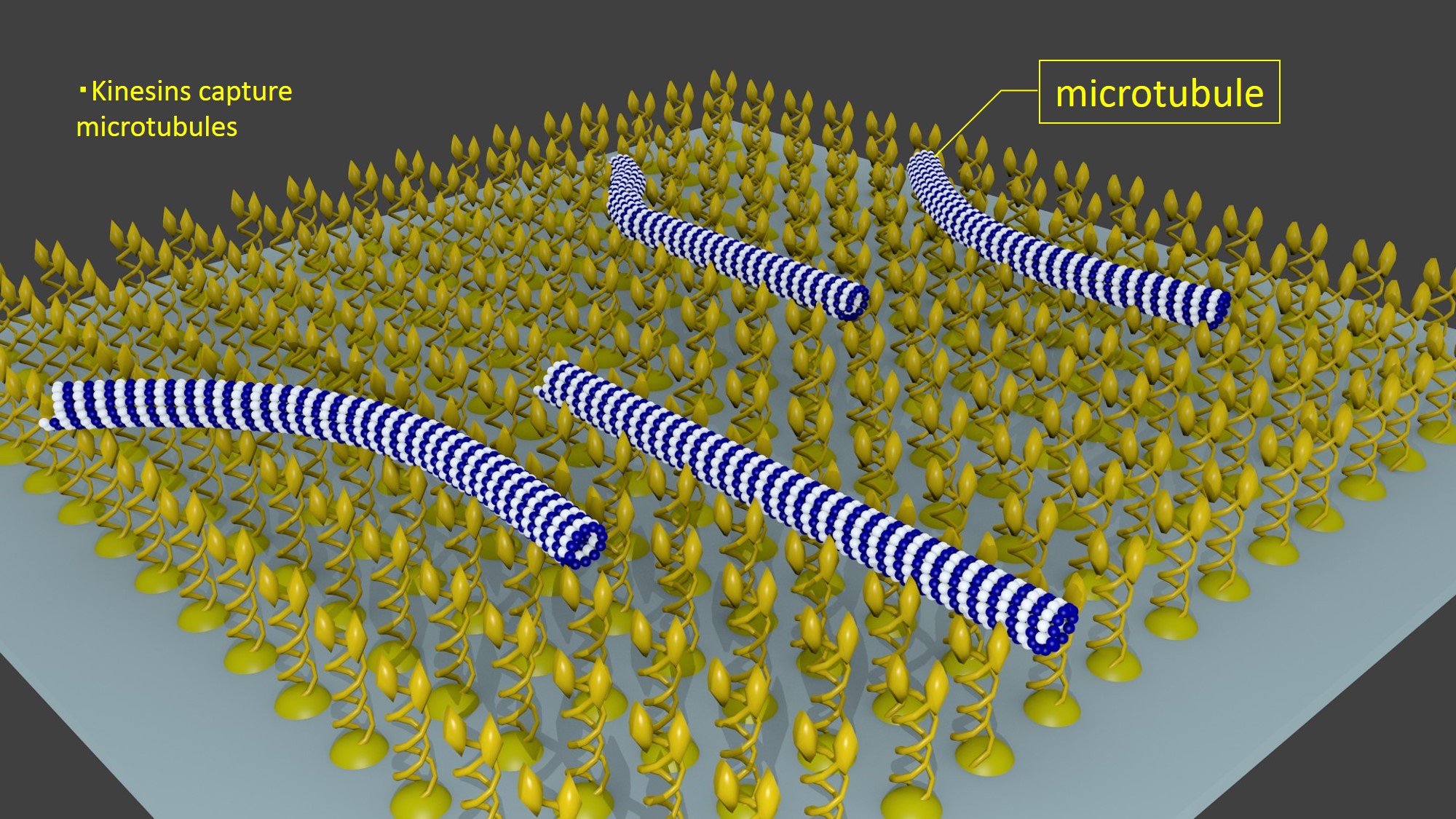
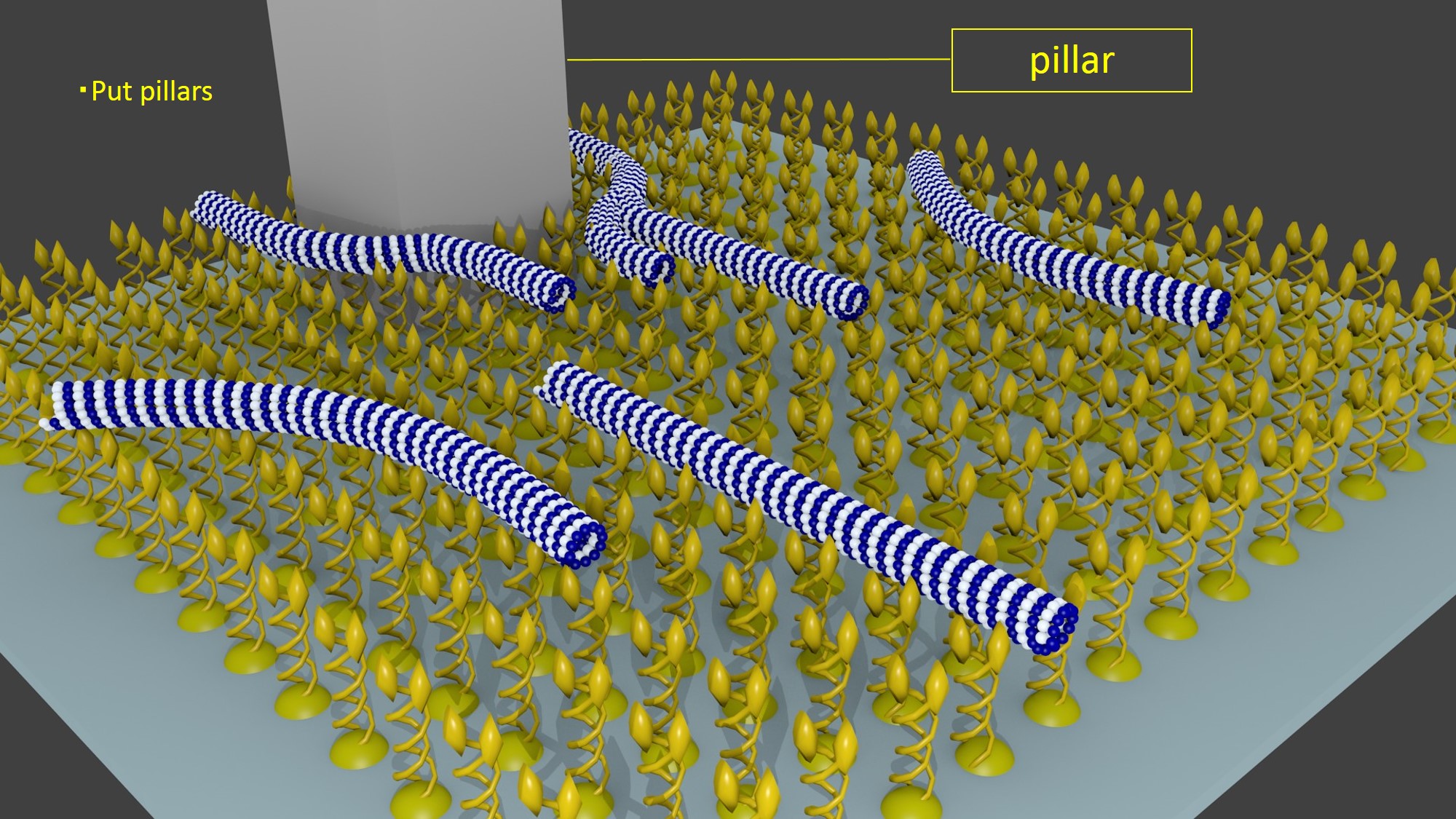
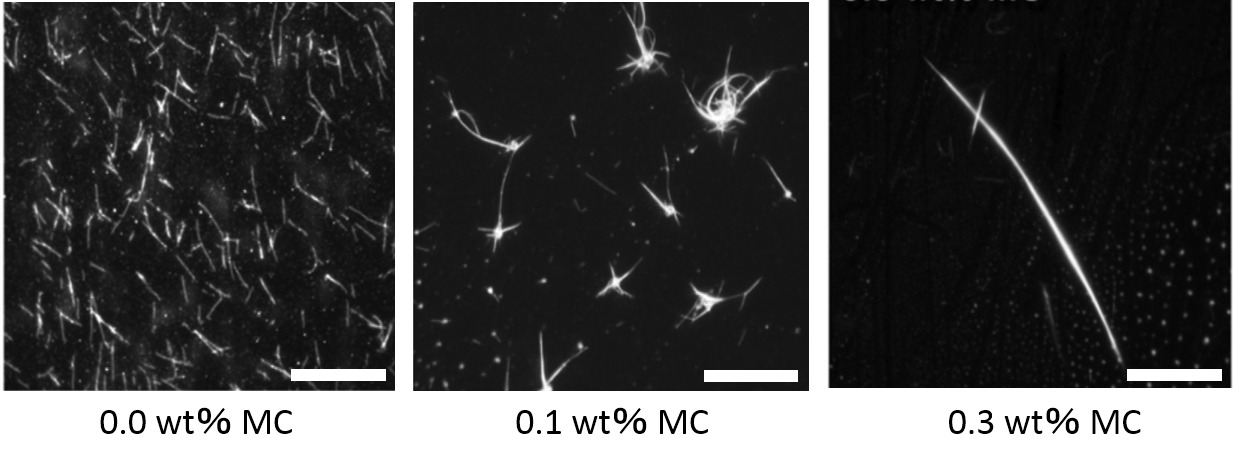
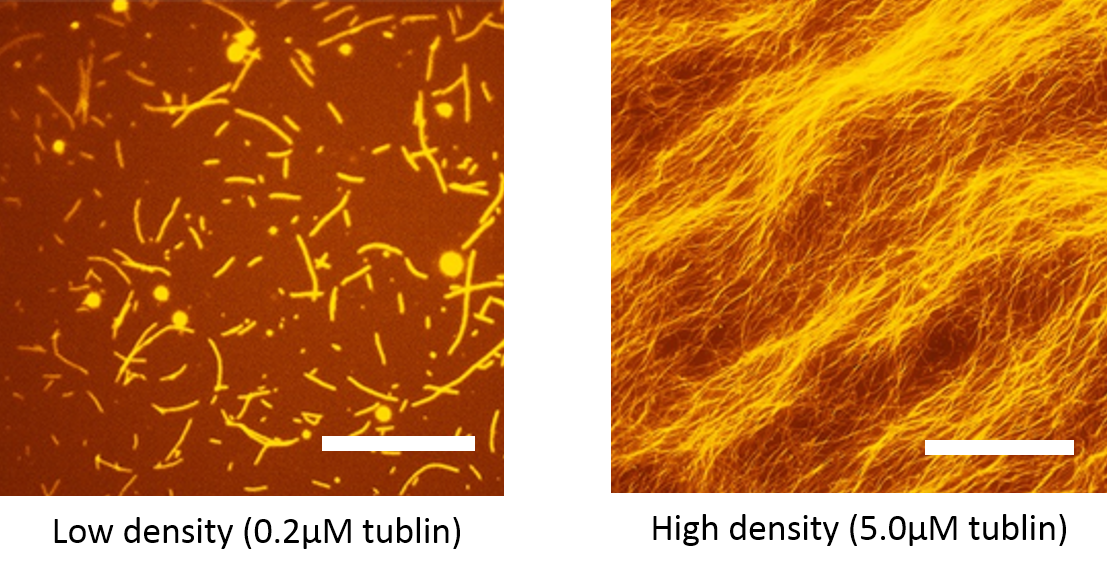
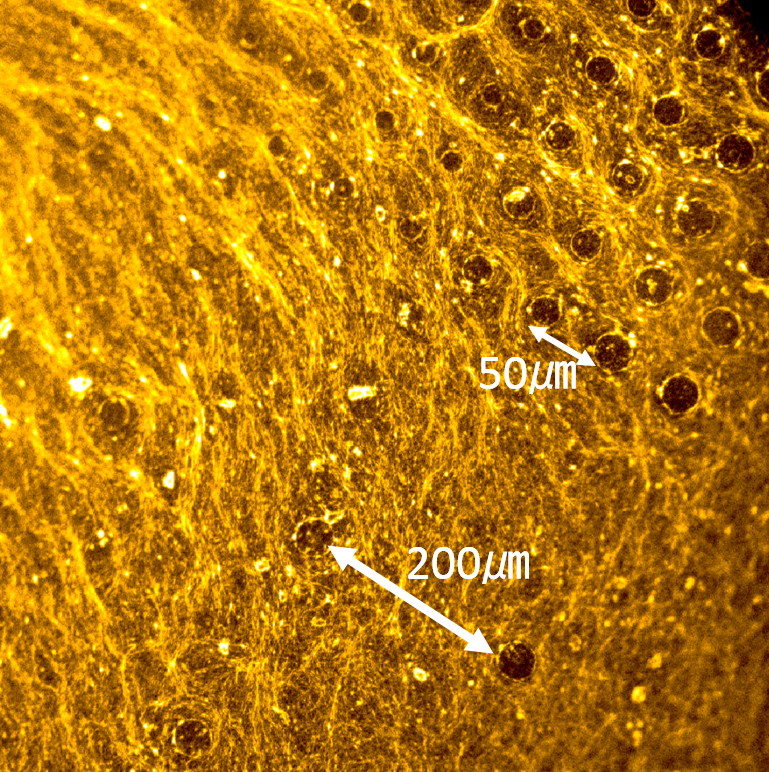
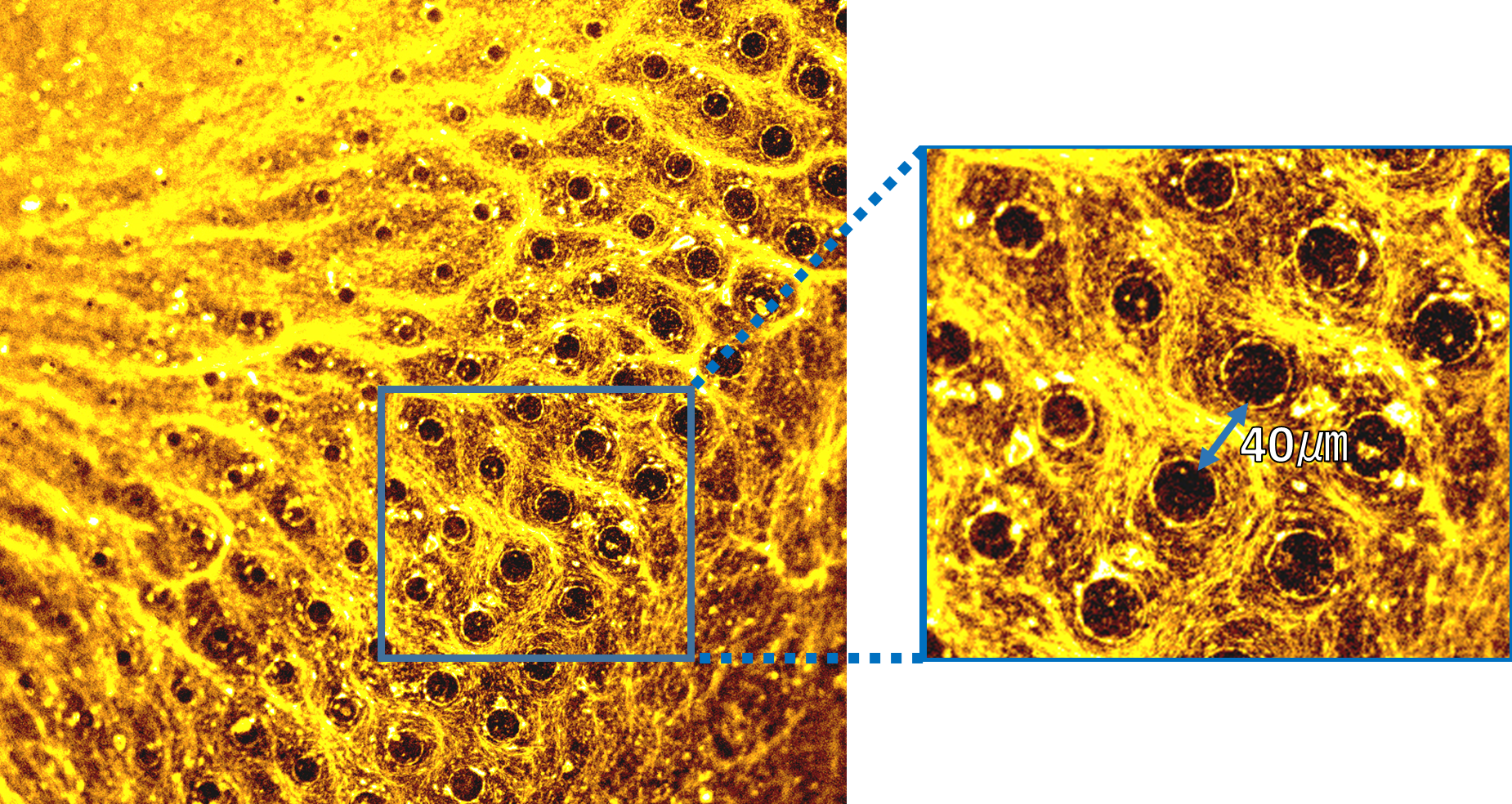
1. To reproduce human crowded motion by using gliding assay of motor-proteins and microtubules.
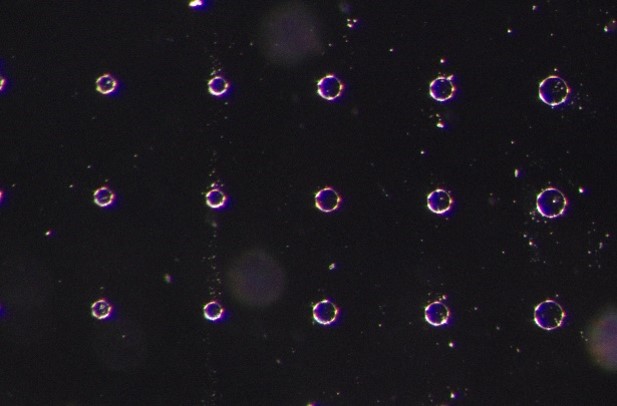
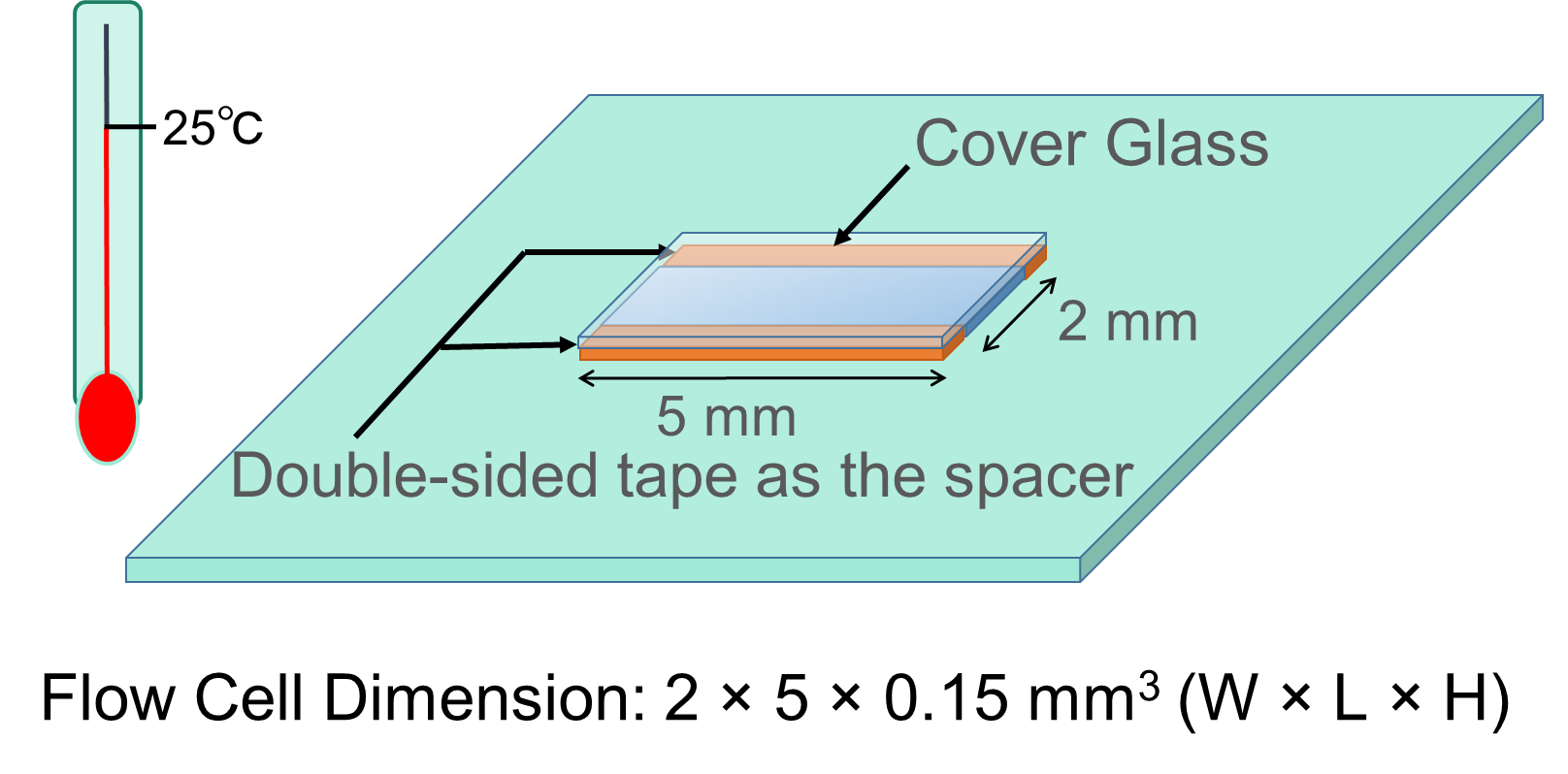
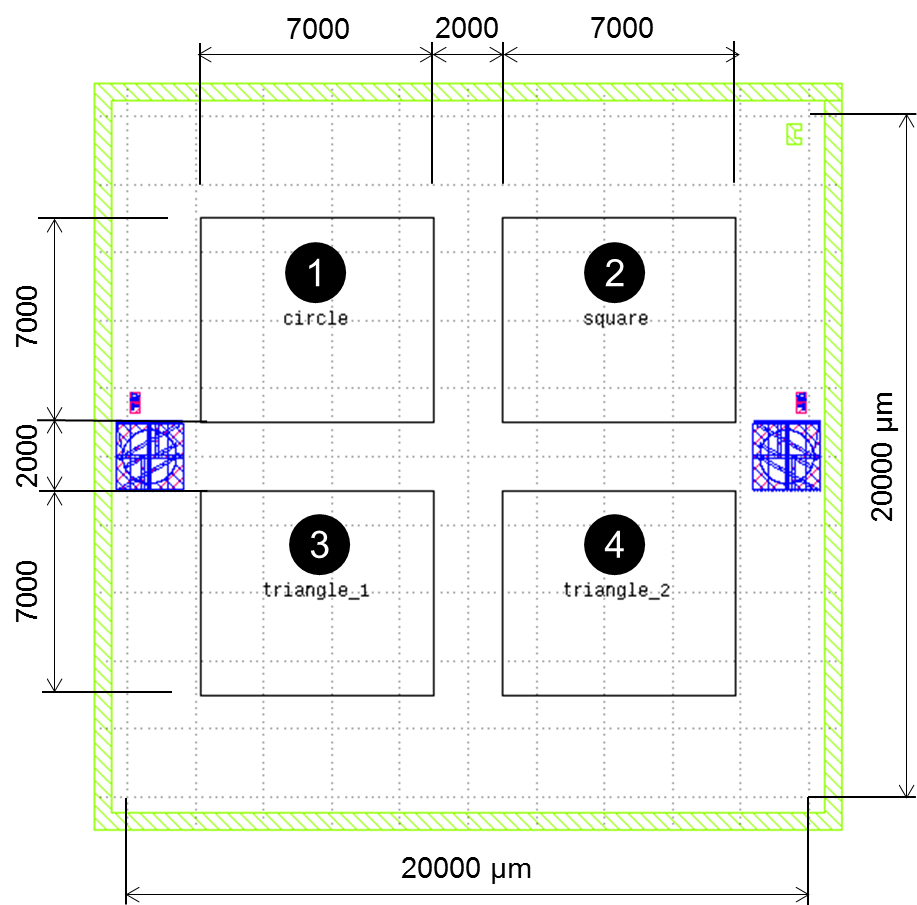
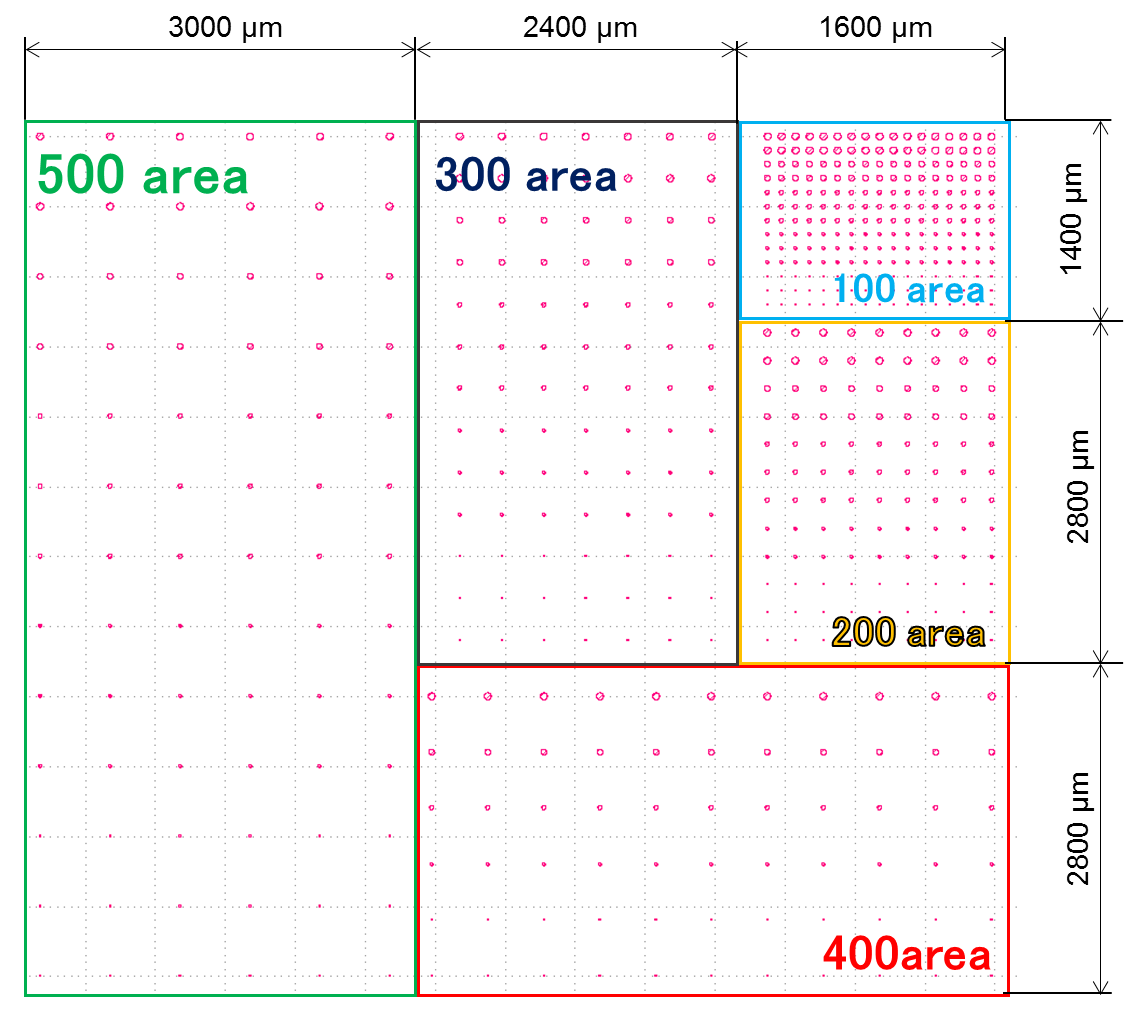
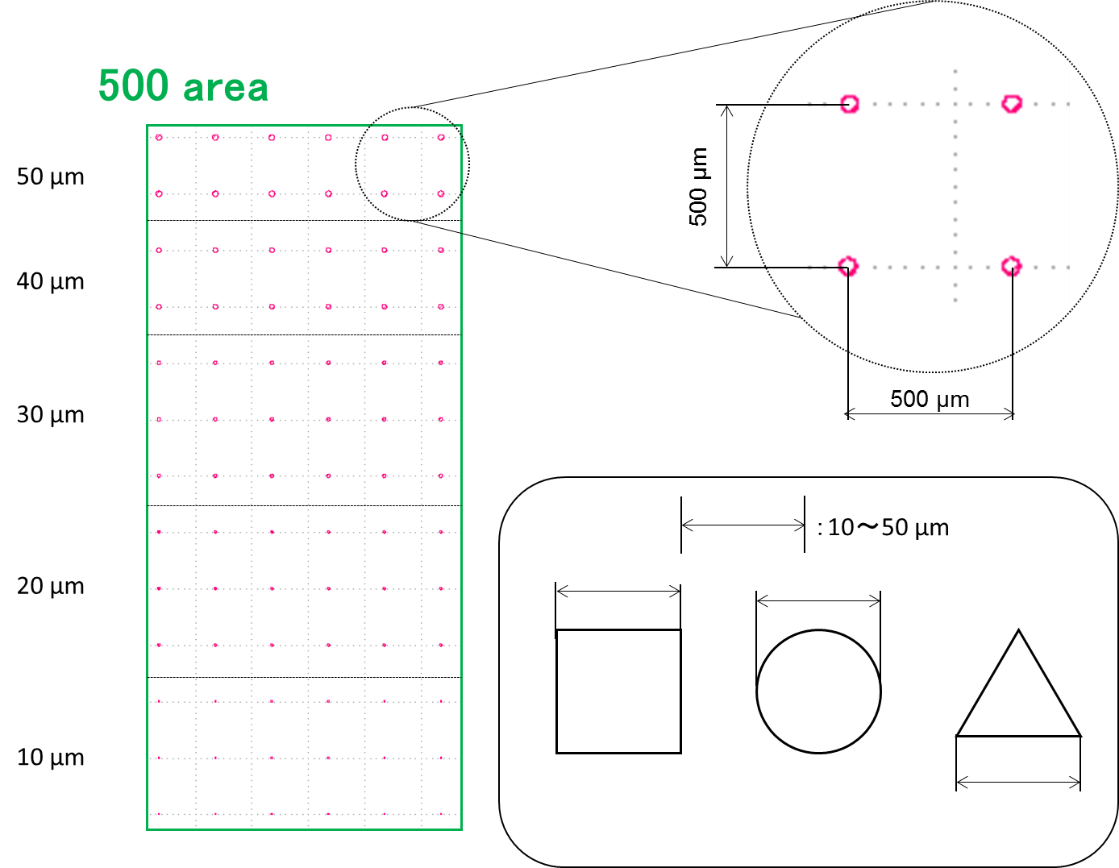
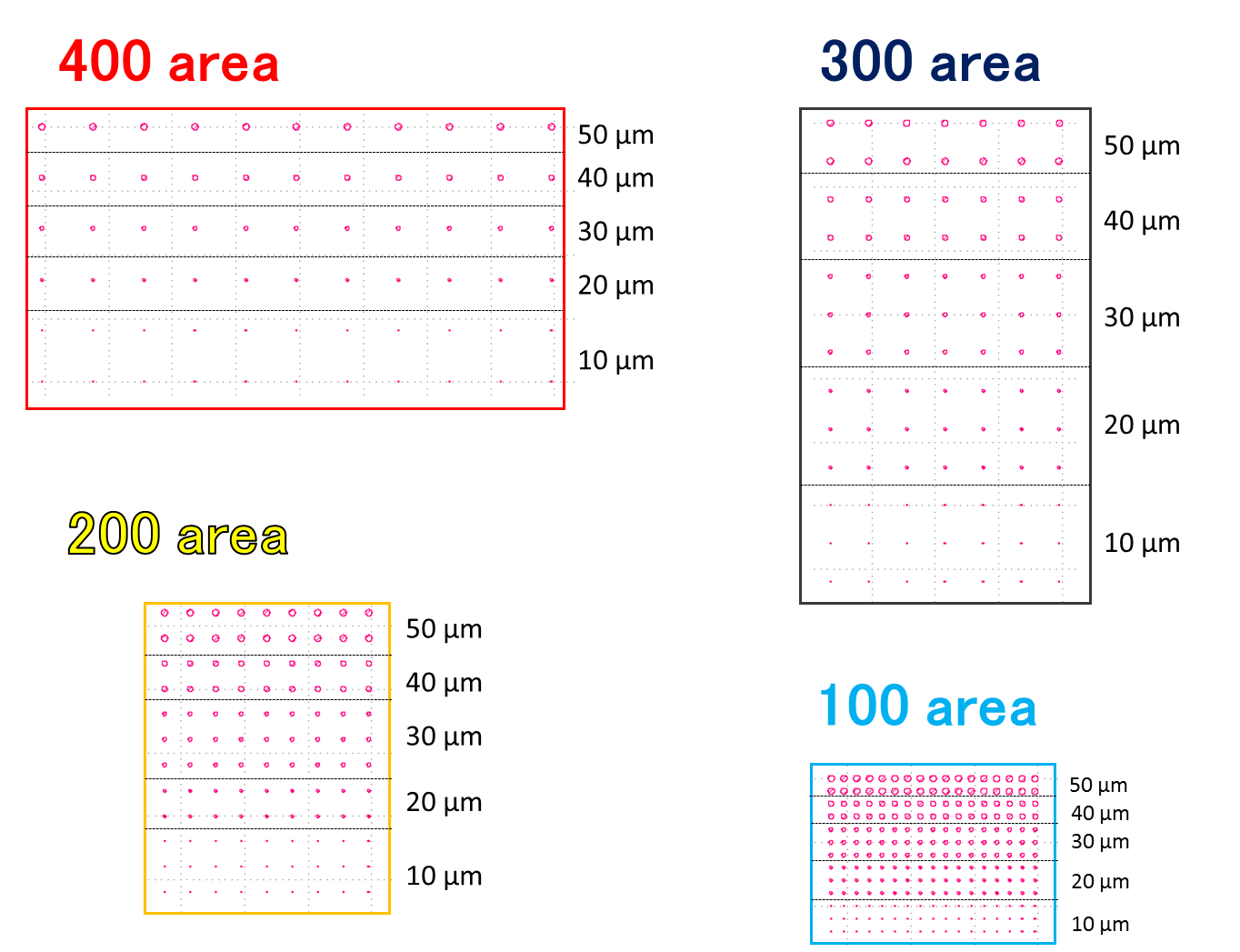
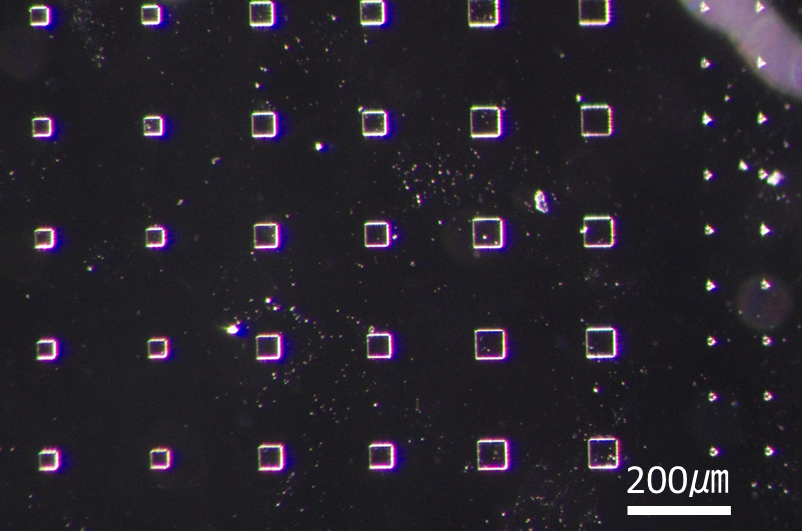
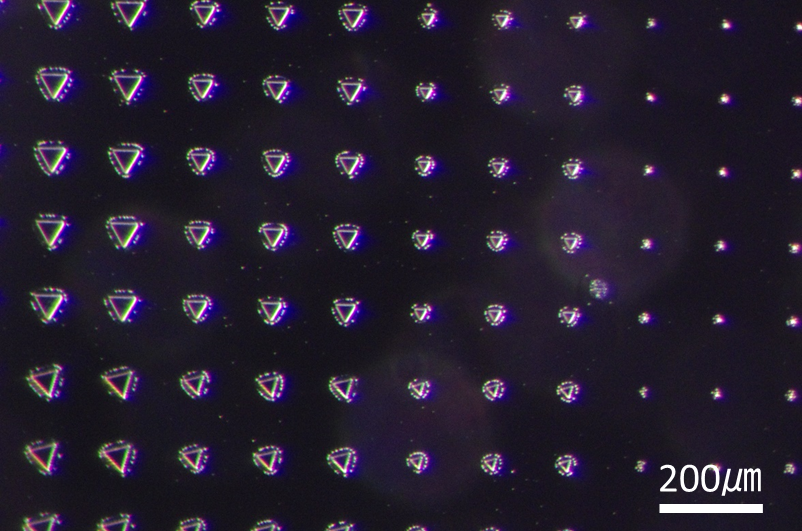
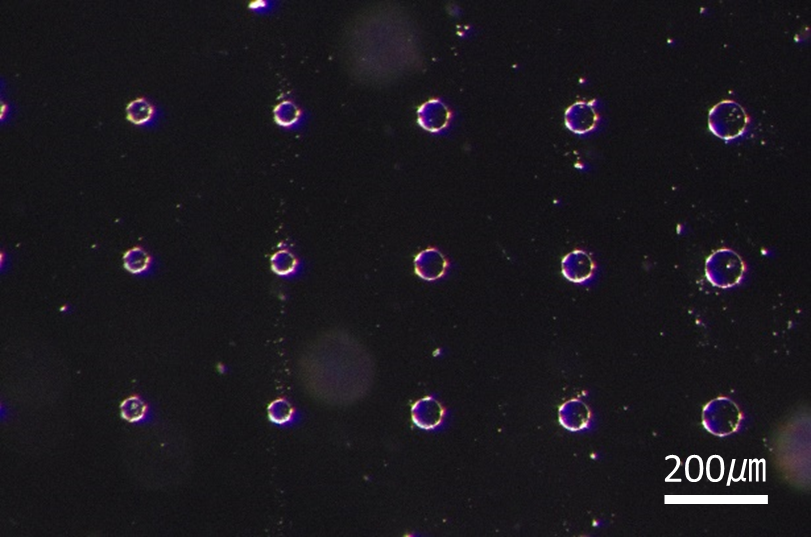
2. To make micro-scale environment for the simulator by nanofabrication technique.
3. To simulate a crowded situation and improve the precision of the simulator.